
Think about the remarkable mechanics of the human knee. As the body’s largest hinge joint, it consists of two rounded bones connected by ligaments that not only swing like a door but also roll and glide over one another, enabling the knee to bend, straighten, and maintain balance.
Researchers at Harvard’s John A. Paulson School of Engineering and Applied Sciences (SEAS) have developed a novel approach to designing knee-like joints for robots, known as rolling contact joints, which could improve robotic grippers, create more personalized assistive devices, and enable robots to move with animal-like agility.
Digital Optimization of Rolling Joints for Task-Specific Force
Published in the Proceedings of the National Academy of Sciences, the new design method optimizes rolling joints digitally by adjusting the shape of each key component to achieve a desired force or function—whether at the tip of a robotic gripper or along a human-like robot’s limb.
“Whenever you have a robot and a clear idea of what it needs to do—like walking—you can determine the optimal points to apply force,” said Colter Decker, a Ph.D. student at SEAS and first author of the study.
“For a walking robot, for instance, you might need more force at the end of each stride to push off. By building these decisions directly into the robot’s mechanics, we can make robots more efficient. They can use smaller actuators because the energy is focused exactly where it’s needed.”
“We approach robot design as tightly integrated with the task and its control,” said Robert J. Wood, the Harry Lewis and Marlyn McGrath Professor of Engineering and Applied Sciences and senior author of the study.
“Our goal is to transfer as much of the motion control as possible to the robot’s mechanics and materials, allowing the control system to focus on higher-level tasks. Colter’s methods achieve this perfectly, with elegance in both their mathematical formulation and mechanical implementation.”
Influence from Gripper Development
The idea to develop improved joint designs came from another project in Wood’s lab: creating a soft robotic gripper that could both gently wrap around objects and exert strong forces.
Exploring ways to combine rigid links with soft, flexible joints—similar to the bones and cartilage in a human hand—led the team to examine rolling contact joints, which consist of curved surfaces that roll against each other and are connected by flexible elements.
In traditional robotics, software and control algorithms usually dictate joint movement. In this new approach, those movement requirements guide the geometric design of each joint.
Although bearings and four-bar linkages are more common in current robots, rolling contact joints provide distinct benefits—such as flexibility, low friction, and high wear resistance—making them ideal for certain applications, Decker explained.

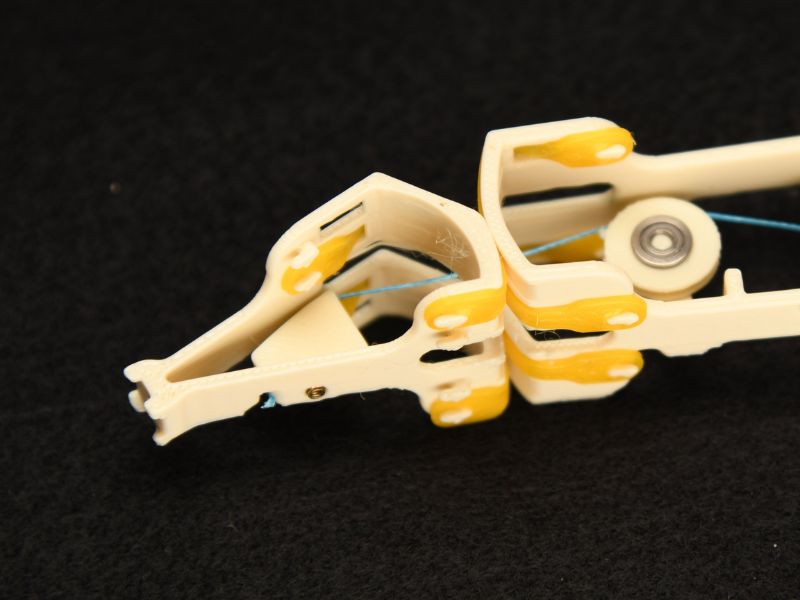
Prototype Knee-Like Joint and Gripper
To showcase their new design approach, the team created two prototypes: a knee-like joint and a two-finger robotic gripper.
Knee-assist devices and exoskeletons typically rely on simple bearings near the knee, which can cause uncomfortable misalignment since a real knee not only hinges but also rolls, slides, and shifts. By mapping the typical motion of a human knee, the researchers used their method to develop an optimized rolling contact joint that closely replicates natural knee movement. They then compared their custom-designed joint with a conventional one.
Their optimized joint performed exceptionally, reducing misalignment by 99% compared to standard devices. This suggests a future where knee braces, exoskeletons, or even joint replacements could be customized to match an individual’s exact joint motion.
For their prototype robotic gripper, they tailored the joints so the fingers could exert maximum force based on the object’s size. As a result, the gripper held over three times the weight of a version built with standard circular joints and pulleys using the same actuator input.
While conventional rolling contact joints use circular surfaces, the Harvard team’s new mathematical approach enables the creation of noncircular, irregular shapes that follow complex, custom paths.
“We developed a mathematical framework to determine if, given a specific desired trajectory and force transmission along that path, we can design surfaces and pulleys that meet those requirements,” Decker explained. “This process allows us to optimize joints for tasks like walking, jumping, or gripping.”
Optimizing human-like joints for varied applications opens numerous possibilities—from task-specific robots to assistive devices and studies of animal biomechanics. “Now that we can design the joints, we can start applying them across all these different scenarios,” Decker added.
Read the original article on: Tech Xplore
Read more: Rapid, Accurate Radioactive Material Localization With Drones and Robots