Asteroid-Hopping Robot Passes Zero G Airplane Test
ETH Zurich
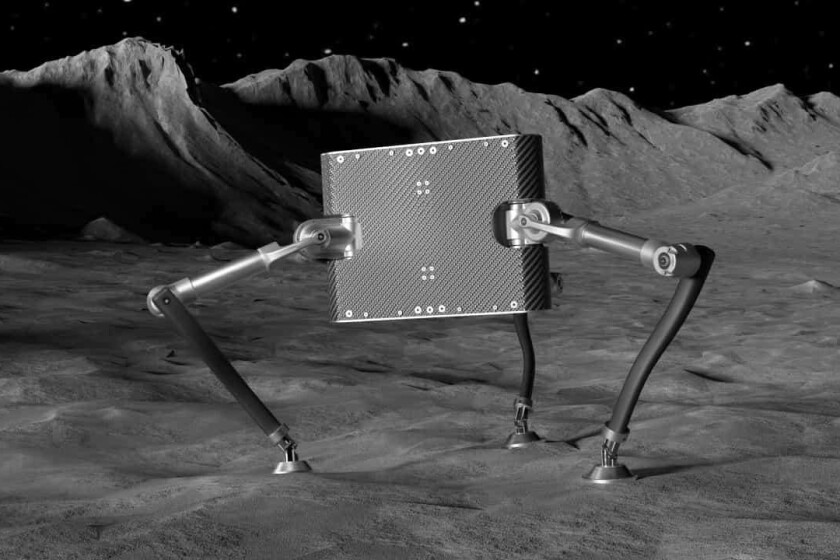
A robot with three legs might soon traverse asteroid surfaces, seeking valuable minerals. Named SpaceHopper, the robot recently underwent testing during a zero-gravity aircraft flight.
The SpaceHopper initiative took flight two and a half years ago, originating as a student research endeavor at ETH Zurich University in Switzerland.
Exploring Low-Gravity Celestial Bodies
Its goal is to tackle the task of effectively surveying low-gravity celestial objects like asteroids and moons. These bodies hold potential reserves of vital materials such as rare-earth metals and offer insights into the universe’s origins.
The SpaceHopper robot, as it stands, features a triangular aerospace-aluminum frame with articulated legs at each apex. Each leg incorporates a knee and hip joint, with two motors propelling the hip through a differential drive system, and another motor controlling the knee.

ETH Zurich/Jorit Geurts
The onboard software, based on deep learning, orchestrates the coordinated actions of the legs, enabling the robot to execute a range of defined tasks. These tasks encompass initiating hops, ensuring the robot’s proper alignment during flight, and executing controlled landings at designated spots.
During the jumping phase, all nine leg motors collaborate to propel the SpaceHopper upward from the asteroid’s surface. While airborne, the robot adjusts its position by extending or retracting its legs selectively to manage its center of mass. Upon landing, the legs flex to absorb impact and maintain the robot’s stability, preventing it from toppling over.
Laboratory Testing in Simulated Low-Gravity Environment
The primary trials of these capabilities took place within an ETH Zurich laboratory, where the robot was affixed to a counterweight and a rotating gimbal to replicate the low-gravity environment of the dwarf planet Ceres.
However, toward the end of last year, members of the student team had the opportunity to accompany the SpaceHopper on an Air Zero G parabolic flight organized by the European Space Agency and French company Novespace. These flights involve an Airbus A310 aircraft executing a sequence of upward and downward arcs, inducing brief periods of weightlessness within the plane.

Nicolas Courtioux
During the flight in 2023, the robot consistently propelled itself off the aircraft floor in a predetermined direction and maintained proper alignment while airborne. The significant moments of these trials are showcased in the accompanying video.
It’s worth mentioning that an earlier project by an ETH Zurich team resulted in the creation of a four-legged asteroid-exploring robot named SpaceBok. The SpaceHopper’s configuration with three legs aims to minimize size and weight compared to the SpaceBok design. In fact, weighing in at just 5.2 kg (11.5 lb) in total, the robot could potentially be transported and deployed from a compact unmanned CubeSat satellite.
Read the original article on: New Atlas
Read more: An Omnidirectional Robot Moves by Scooting, Shuffling, Climbing









