
Carnegie Mellon University
Researchers have developed a four-legged robot inspired by biology, capable of climbing in a distinctive manner. It adheres to rough vertical surfaces using a novel mechanism that is both highly efficient and relatively straightforward. Unlike experimental robots relying on suction-based gripping systems for smooth surfaces, this technology doesn’t apply to rough surfaces like rock, where forming a seal is impossible.
An alternative approach involves utilizing microspine grippers, which consist of an array of minuscule sharp hooks designed to latch onto small crevices and irregularities on the climbing surface. When the gripper is lifted off to advance upward, the hooks disengage from the surface.
Challenges with Passive Microspine Grippers
Passive microspine grippers rely on the robot’s weight to maintain traction, which works adequately on relatively flat surfaces but struggles with more uneven terrain like cliff faces, necessitating a more versatile climbing approach.
To overcome this challenge, active microspine grippers incorporate electric actuators that deliberately embed a ring of hooks into the surface, ensuring a powered grip that functions in any orientation. However, these grippers are typically bulky, energy-intensive, mechanically intricate, and result in slower climbing speeds.
This is where the LORIS quadruped robot enters the picture.

Carnegie Mellon University
Dubbed after a climbing marsupial and also as an acronym for “Lightweight Observation Robot for Irregular Slopes,” the device was developed by Paul Nadan, Spencer Backus, Aaron M. Johnson, and their team at Carnegie Mellon University’s Robomechanics Lab.
Microspine Grippers Configuration
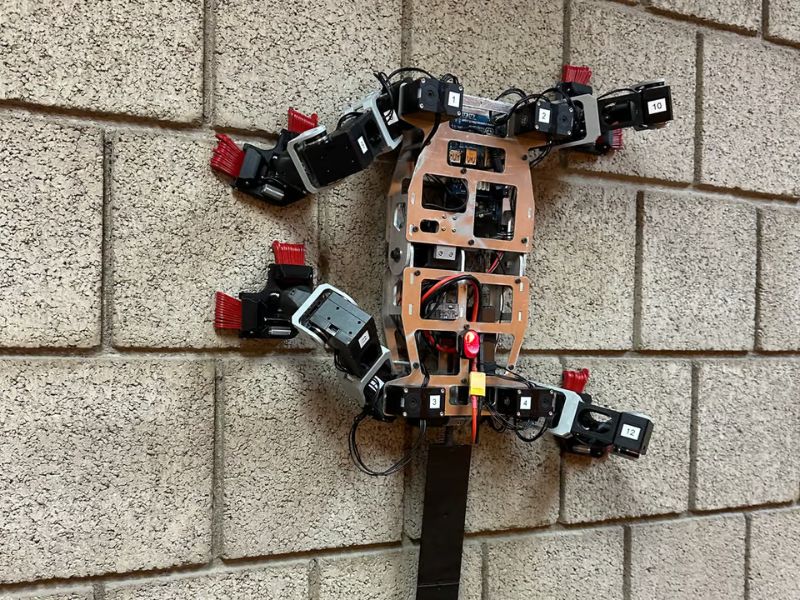
Each of the robot’s four legs features a spread-out microspine gripper, comprising two sets of perpendicular spines. Connected to the leg by a passive wrist joint, the gripper moves freely in response to the leg’s motions.

Carnegie Mellon University
Using an onboard depth-sensing camera and microprocessor, the robot strategically moves its legs so that when one leg’s gripper secures the climbing surface, the gripper on the opposite leg, situated diagonally across the body, also engages.
As long as these two diagonally opposed legs maintain inward tension on their grippers, the grippers remain firmly attached to the surface. Meanwhile, the other two opposing legs are free to ascend. This climbing strategy, inspired by insects, is known as directed inward grasping (DIG).
Innovative Design Features
According to the researchers, LORIS combines the lightweight, swift movement, energy efficiency, and simplicity of passive microspine grippers with the secure hold and adaptability of active grippers. Additionally, the robot is designed to be easy and cost-effective to manufacture.
Watch LORIS in action in the video provided below. A paper detailing the study was recently presented at the International Conference on Robotics and Automation.
Read the original article on: New Atlas
Read more: Who’d Have Thought Robotic Bee Swarms Could be so Captivating?