Drone Air Traffic Control Ensures Safe Skies Using Cost-Effective Radars

Karl Greif / Unsplash
Do you recall when the co-founder of the studio behind the early Call of Duty games accidentally crashed his drone into a firefighting plane battling wildfires in Los Angeles last month?
It turns out that incidents like this can be prevented without a hefty price tag. Researchers at Brigham Young University (BYU) in Utah suggest that an ad-hoc air traffic control system for drones could be implemented for just a few hundred dollars.
Affordable Radar Network for Real-Time Drone Tracking
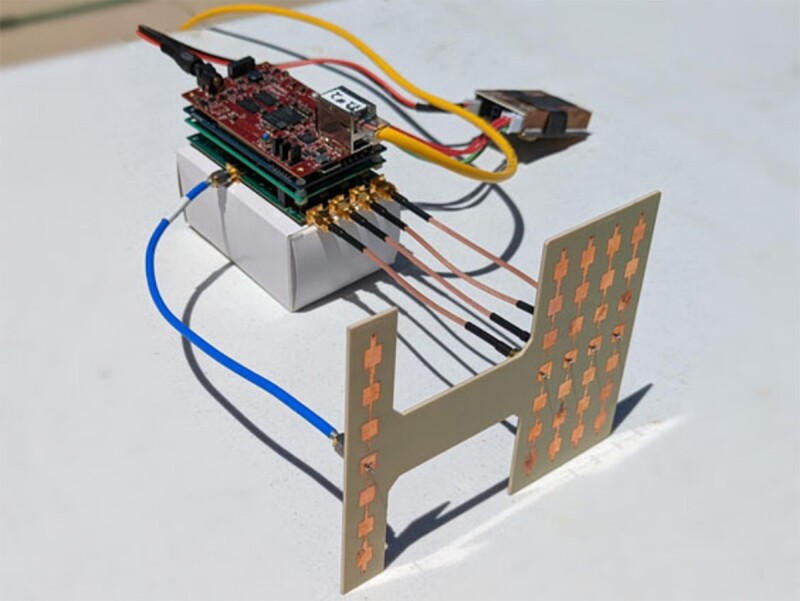
The team’s Local Air Traffic Information System (LATIS) relies on a network of low-cost radars, a base station equipped with networking hardware and a laptop, and an advanced algorithm to track multiple drones in real-time at relatively low altitudes.
While airport traffic control towers require highly sophisticated, multi-million-dollar systems, it’s interesting to see that monitoring drones can be done affordably.
In fact, BYU’s system is designed for quick, temporary deployment, using compact, energy-efficient radars that are both portable and cost-effective.
Brigham Young University
The system can also be quickly recalibrated if any of the radars are bumped or repositioned. These features make it especially useful in disaster-stricken areas, where tracking drone activity and preventing collisions with aircraft is crucial.
High-Precision Tracking with Phased-Array Radar
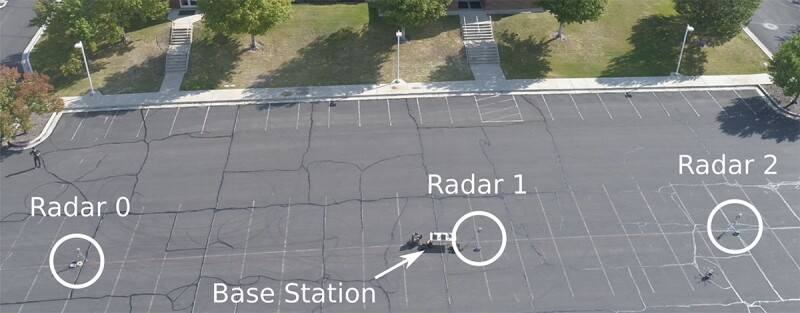
The radar network relies on real-time kinematic GPS (RTK-GPS) data and uses phased-array radars capable of scanning their field of view in under a second. By positioning the radars 100 feet (30 meters) apart and angling them skyward with overlapping coverage, the team’s algorithm integrates the data to track multiple drones simultaneously as they navigate through the air.
Brigham Young University
This networked approach using phased-array radars is particularly effective for tracking low-altitude drones and addresses the limitations of a single radar, such as restricted range, difficulty monitoring objects in complex environments like dense urban areas, and the risk of mechanical failure in rotating systems.
In their study, published last November in the Journal of Intelligent & Robotic Systems, the researchers reported that the LATIS network tracked drones with an average error of less than 3 feet (1 meter) in each principal direction. This level of accuracy is impressive for a rapid-deployment system and could serve as a model for future implementations in disaster response scenarios.
Read the original article on: New Atlas
Read more: DARPA Aims to Wirelessly Charge Drones Mid-Flight with Power-Beaming









