EPFL
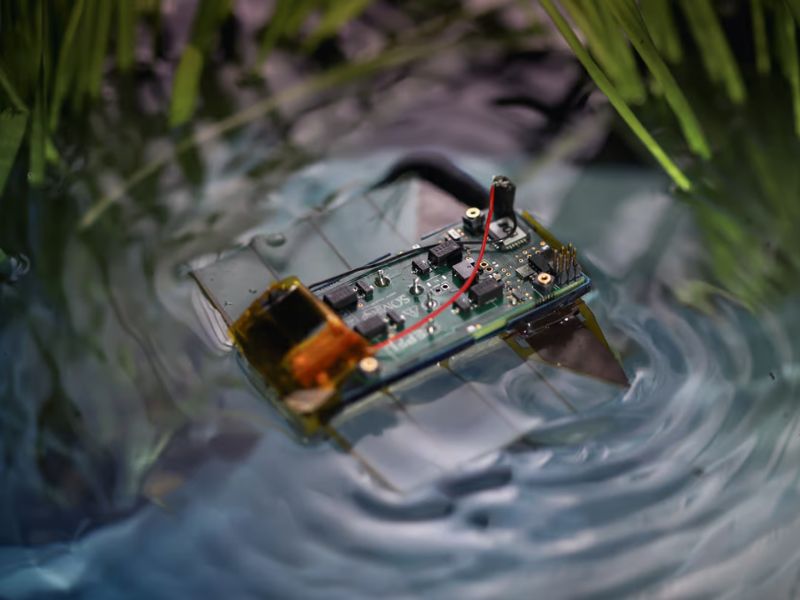
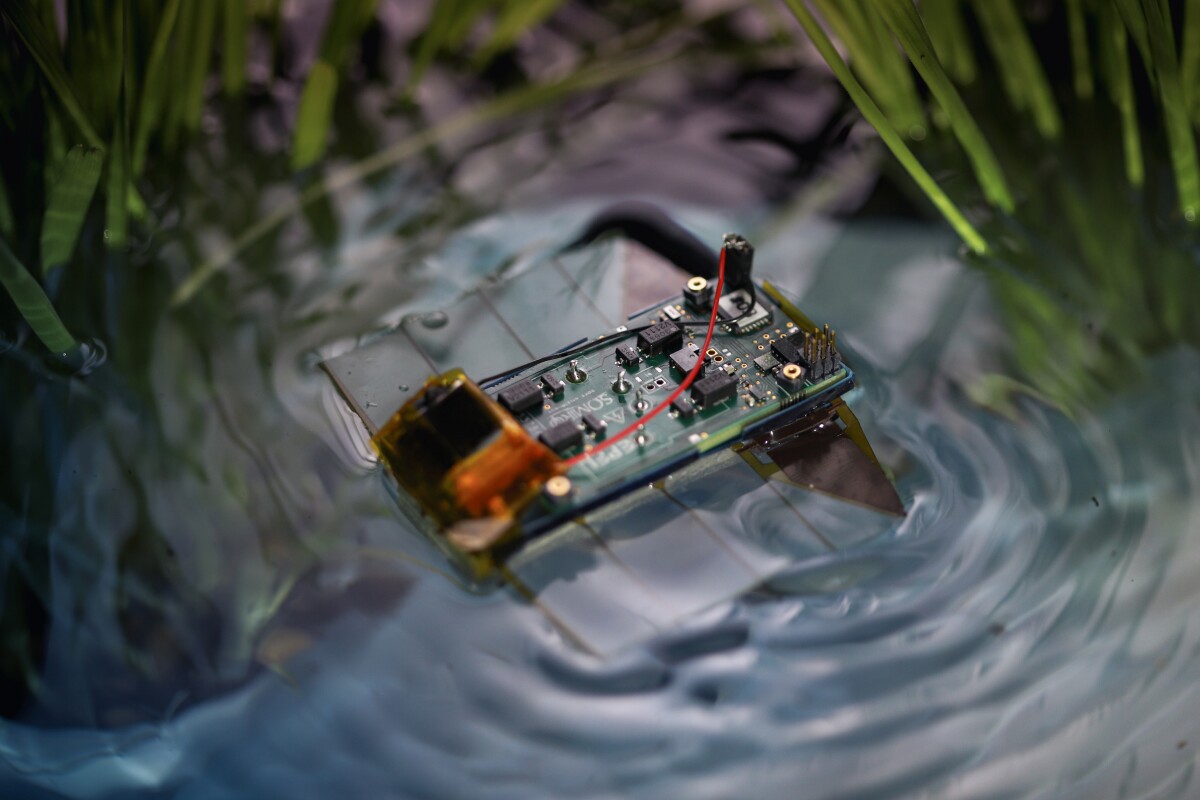
Robots collecting data in delicate aquatic environments should avoid whirring propellers that could injure wildlife or tangle in weeds. A new bot solves this problem by mimicking the swimming motion of flatworms.
While marine flatworms typically remain on the seabed, they can navigate open water by undulating their thin, flat bodies. Waves ripple from the front to the back, generating forward movement.
Researchers at Switzerland’s EPFL have replicated this motion in a small, untethered robot capable of moving in any direction across the water’s surface. Weighing just 6 grams, the battery-powered device measures 45 mm in length and 55 mm in width.
Wave-Driven Propulsion
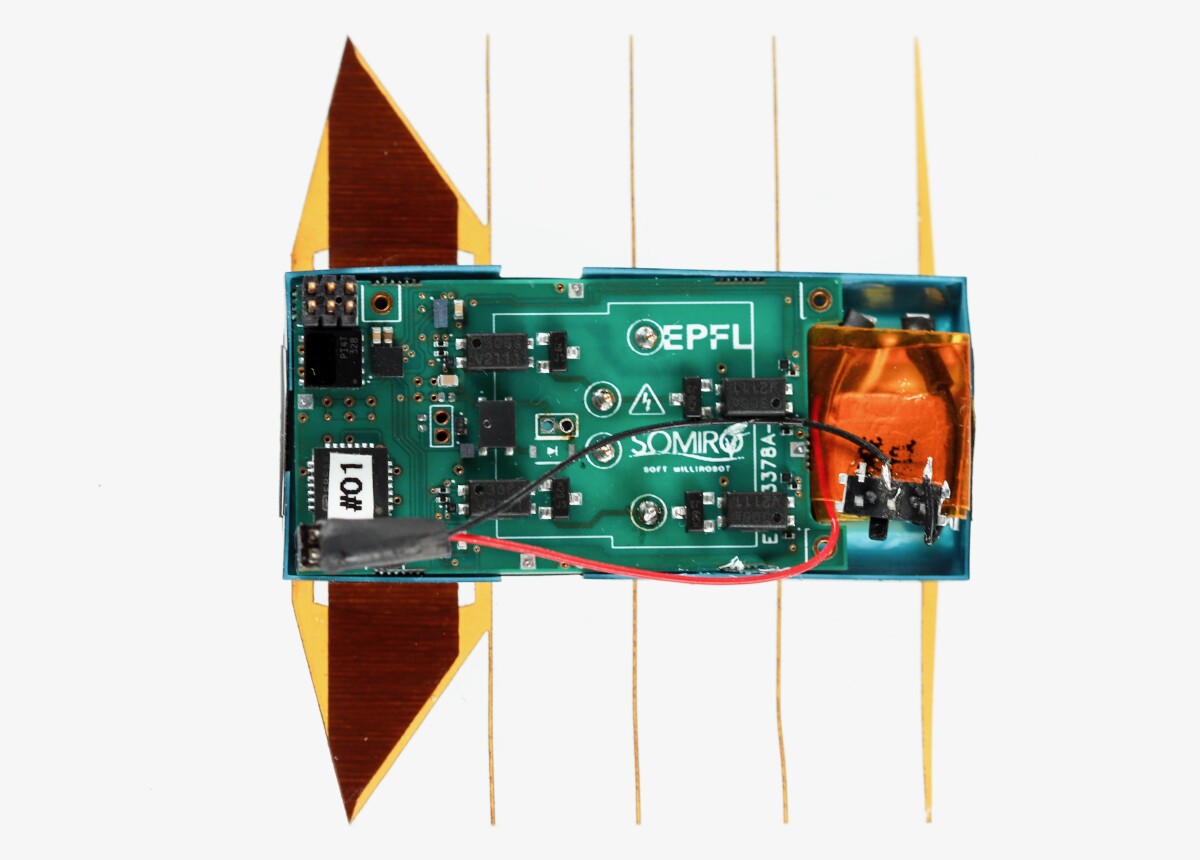
Its propulsion system features two soft, flexible rubber membranes, each 6 mm thick, functioning as pectoral fins. Each fin is linked to an electrohydraulic actuator that generates traveling waves through the membrane. An onboard control system supplies up to 500 volts to the actuators while consuming only 500 milliwatts of power.
With this design, the robot can glide across the water at speeds of up to 12 cm (4.7 in) per second. It even outperforms the flatworm’s swimming technique, as its fins undulate ten times faster than the worm’s body. Additionally, the robot can move forward, turn in either direction, and—when equipped with two extra actuators—travel sideways or backward. Notably, it operates without generating any motor noise.
EPFL
The prototype features light sensors acting as basic eyes, enabling it to autonomously track moving light sources. It can also push floating objects over 16 times its own weight.
Future iterations of the robot could be used for environmental monitoring, pollution detection, and precision agriculture in settings like flooded rice paddies.
Advancing Bioinspired Robotics for Real-World Integration
“Our goal is to extend operating times and improve autonomy,” says former EPFL researcher Florian Hartmann, now a research group leader at Germany’s Max Planck Institute for Intelligent Systems. “The key insights from this project will not only push the boundaries of bioinspired robotics but also pave the way for practical, nature-integrated robotic systems.”
The study was recently published in Science Robotics. You can watch the robot in action in the video below.
For another approach to bioinspired surface-swimming robots, check out Washington State University’s WaterStrider robot.
Read the original article on: New Atlas
Read more: Helix: The Fully Autonomous, Hive-Minded VLA Humanoid Robot